 登錄
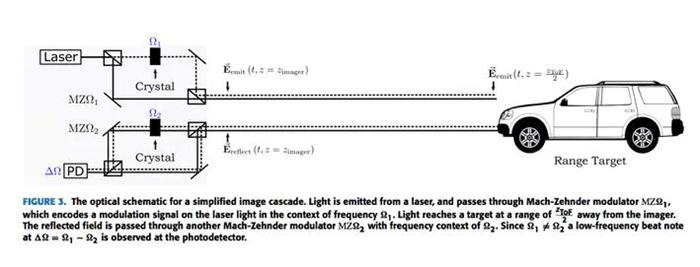
登錄據(jù)外媒報(bào)道,MIT旗下攝像頭文化小組(Camera Culture group)的研究人員發(fā)表了論文,其在文中提到了飛行時(shí)間成像新方法(time-of-flight imaging),將深度分辨率(depth resolution)提升了1000倍。對(duì)自動(dòng)駕駛車輛而言,該高清分辨率或?qū)⒎浅?shí)用。
新方法或?qū)⒛芡高^濃霧,實(shí)現(xiàn)精準(zhǔn)測(cè)距,解決自動(dòng)駕駛研發(fā)中的一大難題。當(dāng)前的飛行時(shí)間系統(tǒng)的測(cè)距為2米,深度分辨率約為1厘米。對(duì)于當(dāng)今車輛所搭載的輔助停車系統(tǒng)及碰撞探測(cè)系統(tǒng)而言,上述參數(shù)已足夠好了。
然而,MIT研究人員推出了這款新系統(tǒng),在同樣的測(cè)距范圍內(nèi),其深度分辨率可達(dá)3微米。研究人員Kadambi還進(jìn)行了相關(guān)測(cè)試,利用長(zhǎng)達(dá)500米的管線傳輸光信號(hào),每隔一段距離配置濾光片(filters),旨在模擬長(zhǎng)距離傳輸中能量衰減(power falloff),然后再流入系統(tǒng)。上述測(cè)試表明,在500測(cè)距范圍內(nèi),MIT的新系統(tǒng)仍能實(shí)現(xiàn)深度分辨率,但只能達(dá)到1厘米。
光爆長(zhǎng)度(light-burst length)是決定該系統(tǒng)深度分辨率的因素之一,另一項(xiàng)因素為檢測(cè)率(Detection rate),正是該參數(shù)限制了當(dāng)前飛行時(shí)間系統(tǒng)的分辨率,使其僅停留在厘米級(jí)。
Kadambi表示,若要提升分辨率,還需要借助另一項(xiàng)技術(shù)——干涉測(cè)量(interferometry),將光束一分為二,其中一條保持其流動(dòng)(circulating),令外半束則作為“樣本光束(sample beam)”,并入視覺場(chǎng)景內(nèi)。當(dāng)反射后的樣本光束與另外的半束光束從重新融合后,兩束光束將出現(xiàn)相位差——電磁波(electromagnetic waves)的波峰波谷(troughs and crests)將進(jìn)行相關(guān)性校準(zhǔn),從而提供超高精度測(cè)距,測(cè)試樣本光束的行程。
相較于低頻率系統(tǒng),Gigahertz光學(xué)系統(tǒng)對(duì)濃霧測(cè)距補(bǔ)償值要優(yōu)于前者。濃霧是飛行時(shí)間系統(tǒng)的一大難題,因?yàn)闀?huì)造成散射,致使返回的光信號(hào)轉(zhuǎn)向或偏斜(deflects),導(dǎo)致信號(hào)延遲或出現(xiàn)光束傾斜。但若啟用高分辨率系統(tǒng)后,上述問題就能解決。

際新能源汽車產(chǎn)業(yè)博覽會(huì)")

業(yè)展暨國(guó)際新能源汽車大會(huì)")